coloured towers · Parte 2 de 2
As Alegrias da Cor, Tecnologia e Luz
Parte 2 — Desafios Técnicos e Experimentos
Neste post, mergulhamos no lado técnico da construção das torres de LED de 4 metros de altura para o artista britânico Dave Bramston. Se você tem curiosidade sobre a história criativa por trás dessa colaboração e como trabalhamos juntos para criar as Coloured Towers durante a pandemia para o The Bowes Museum no Reino Unido, confira a Parte 1: A História por Trás da Obra.
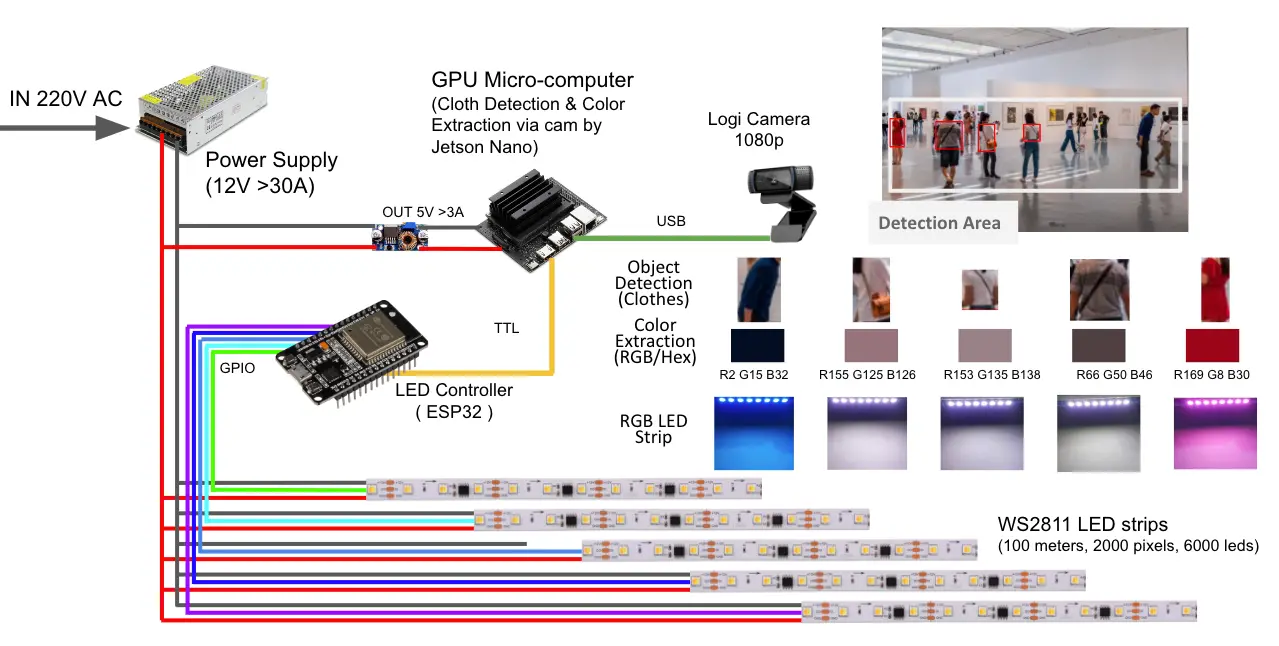
Quando se tratou de concretizar esta instalação artística, havia vários obstáculos técnicos que precisávamos superar na TechxArtisan. O hardware essencial que utilizamos incluiu o Jetson Nano da Nvidia — um microcomputador de baixo consumo com suporte a GPU, perfeito para executar algoritmos de IA — e o ESP32, uma unidade microcontroladora (MCU) amplamente utilizada que gerencia eficientemente a comunicação entre o computador host e as unidades de luz LED usando a biblioteca FastLED.
Aqui está uma visão geral resumida do processo:
- Algoritmos de IA no Jetson Nano detectam as roupas que as pessoas estão vestindo através de uma câmera.
- Agrupamento K-means é usado para extrair a cor dominante de suas roupas.
- Os valores RGB extraídos são enviados para o ESP32, que controla as fitas de LED conectadas à obra de arte.
Agora, vamos detalhar alguns dos desafios técnicos mais interessantes que encontramos.
Detectando Roupas com o Nvidia Jetson Nano
O Jetson Nano nos permitiu executar modelos de IA de código aberto treinados para detectar roupas humanas. O processo envolve capturar cada quadro de imagem de uma câmera, dividi-lo em uma matriz de grades 10x16 e executar um modelo para identificar quais grades correspondem ao nosso alvo — roupas, neste caso. Embora o modelo seja projetado para detectar uma variedade de objetos, incluindo aqueles na lista de Classes MHP, o utilizamos especificamente para detecção de roupas.
Traduzindo Cores Entre a Realidade e o Digital
A visão humana percebe cores através da luz refletida, mas as máquinas “veem” cores capturando imagens e convertendo-as em códigos digitais. Aqui é onde a parte complicada entra — as câmeras nem sempre capturam cores com precisão devido a fatores como iluminação, foco, balanço de branco e configurações de exposição. Nosso objetivo foi diminuir essa lacuna e capturar cores o mais próximo possível da realidade.
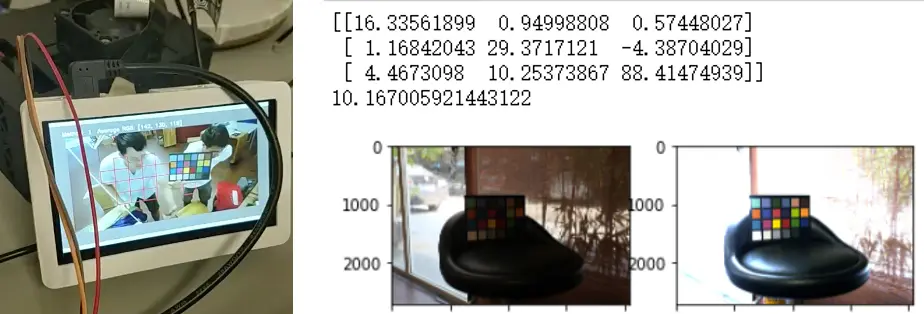
Uma vez que a máquina detecta uma cor, aplicamos o agrupamento k-means para extrair a cor dominante das roupas. Esses valores RGB são então calculados em média e enviados ao controlador de LED.
Cores dos LEDs e o Problema RGB
As fitas de LED (série ws281x) que utilizamos podem misturar canais vermelho, verde e azul (RGB) para criar uma ampla gama de cores. Mas existem algumas limitações:
- As luzes LED têm dificuldade em representar cinzas e pretos se as roupas do visitante forem escuras. Os LEDs simplesmente reduzem o brilho geral.
- Nossas fitas ws281x tendem a ter um leve desvio para o azul, o que significou que tivemos que ajustar finamente o balanço de cores no software para obter os tons corretos.
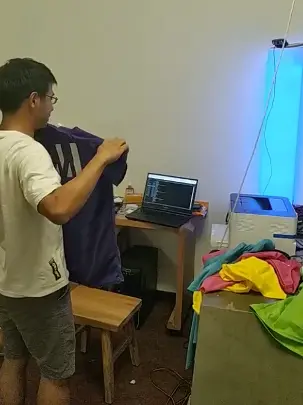
Há também um interessante ciclo de retroalimentação em jogo: quando a máquina detecta a cor das roupas de alguém, ela projeta uma cor de luz LED correspondente, que por sua vez intensifica o tom original da roupa. Isso cria um processo dinâmico e iterativo que torna a interação mais divertida, especialmente com múltiplos participantes vestindo cores diferentes.
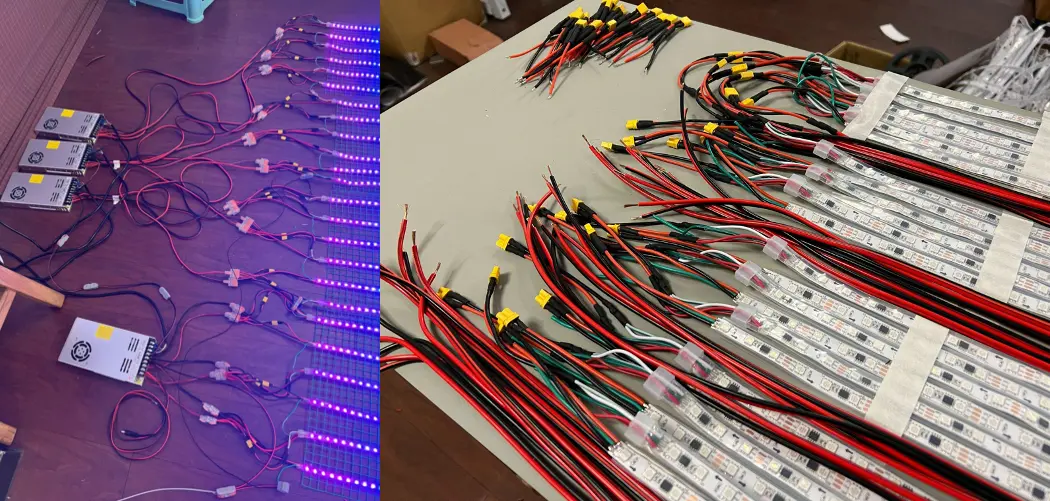
Alimentando Todas Aquelas Fitas de LED
Iluminar tantas fitas de LED de forma segura e eficiente não foi tarefa fácil. Cada um dos quatro pilares exigiu cálculos de potência cuidadosos para garantir que o sistema pudesse suportar a carga sem problemas. Aqui está um resumo rápido:
Para cada pilar:
- 24 fitas de LED × 4 metros por fita = 96 metros de LEDs por pilar
- 96 metros × 60 LEDs por metro = 5.760 LEDs
- Cada fita usa 4 ampères em potência máxima (luz branca)
- Então, 24 fitas × 4 ampères = 96 ampères necessários para um pilar
- 96 ampères × 12V = 1.152W por pilar
Isso totaliza cerca de 4.600W quando todos os quatro pilares estão em intensidade máxima. No entanto, a maioria das animações de luz que criamos consome significativamente menos energia, já que raramente usamos luz branca total. Ainda assim, incorporar alguma redundância garante que o sistema permaneça seguro e estável.
Para os mais técnicos, aqui está um trecho do nosso código FastLED:
const uint8_t kMatrixWidth = 12;
const uint8_t kMatrixHeight = 80;Isso nos permitiu controlar 12 x 80 = 960 pixels por pilar.
Considerações Finais
Para insights técnicos mais aprofundados, confira minha publicação na comunidade FastLED no Reddit. Gostaria de dar um agradecimento especial a Quindor e Charles Goodwin pelo apoio e votos positivos. Colaborar com Dave Bramston e o The Bowes Museum foi uma experiência incrivelmente gratificante, e estamos ansiosos para continuar expandindo os limites da arte e da tecnologia.
Se você está trabalhando em um projeto semelhante ou apenas tem curiosidade sobre esse tipo de instalação, sinta-se à vontade para entrar em contato — estamos sempre felizes em compartilhar nosso conhecimento e aprender com outros na comunidade.
Obrigado pela leitura!
Em resumo: Quatro pilares, ~5 m cada · 5.760 LEDs por pilar · Nvidia Jetson Nano + ESP32 · Journey in Colour, The Bowes Museum, 18 de junho – 30 de outubro de 2022.